
MyBatisのInterceptorで削除データロガーを実装する
2025/06/19

電源としてLDO/降圧DCDC/昇圧DCDCの解説をしていますが、必ずこれにぶら下がる負荷側の認識が必要となります。
別の話の様ですが、実際は電源の話ですので、じっくり読んで下さい。
IoT機器を構成するには、MCU/CPU(所謂マイコン)とRF部と2つの構成が必要となります。
※有線仕様のIoTもありますが、無線IoTが分かれば、有線IoTにも転用できますので、この形で解説を進めます。
※因みに、ラズベリーパイや携帯電話に使われている、マイコンの事はMPUと呼ぶそうです。OSで動かす様なマイコンはMPUと言って分けます。
弊社ではNordic Semiconductor社製のSoCを良く使います。というか全部それです。
https://www.nordicsemi.com/
SoCとは”System On Chip”と呼ばれます。他に似たICがSiPというのもあり、此方は”System In Package”の略です。
簡単に違いを説明しますと、
SoC:1つのICの中には、複数の機能を1個のシリコン内へ全て組み込んだチップ
SiP:1つのICの中に、複数のチップ(ダイ)を入れ、お互いをICの中で配線で繋いだチップ
と言うことで問題無いです。
最近は、CMOSプロセス全盛の時代ですが、例えば全く製造プロセスが異なるチップを1つのプロセスで作るのが難しい場合も有ります。
そう言う場合は、SiPとして異種プロセスを混成して、一見一つのICに見えるようするのも合理的です。
Nordic社のBluetooth LEチップは全てSoCですので、1つのダイしかICに入っていません。
では、どの複数の機能を1つのシリコンダイに組み込んだのかというと、MCUとRFです。
BluetoothLE機能というRF部と、マイコンの部分が全く同じプロセスで、同一平面上に一緒に作られています。
今から10年前の2012年末だったと思いますが、Bluetooth LEとMCUをSoC構成として、Nordic社が発表した時の衝撃は今でも忘れません。
それ以前は、MCUとBluetooth部は完全に別れており、2チップ構成で開発するのが当たり前でした。
じつはその更に前には、MCUと独自2.4GHzの無線をSoCとしていたチップは存在してました。nRF24E1でしたかね。
これは、確か2004年前後だったと記憶します。
そして、現在ではNordic社のnRF5xシリーズは圧倒的なシェアを誇っているのは皆さんご存知の筈です。
良く、Bluetooth LE用のチップを『RFチップ』というエンジニアが居られますが、ちょっと間違ってます。
少なくとも、nRF52xxxシリーズは『マイコン』なんです。その『マイコン』にBluetooth LEのハードウェアが追加されたSoC。
これが正しい理解です。
UART機能があるマイコンを「UARTチップ」とか、
ADC機能があるマイコンを「ADCチップ」とか、
PWM機能があるマイコンを「PWMチップ」とか言いません。
Bluetooth LE機能があるマイコンは、「RFチップ」ではなく、単なる『(BluetoothLEをも組み込んだ高機能の)マイコン』なんです。
そう言う視点で、ここからの話を進めます。
実は2000年を過ぎた頃に、世界中のマイコンの基本動作の構成が大きく変化して行きました。
マイコンというのは、現代のMPUがOSを使って実現する『マルチタスク』が出来ず、『シングルタスク動作』の制限が有ります。
プログラムの行に応じて順番に処理するしか出来ません。
また、マイコンは充分に消費電流は少なかったので、ずっと動きっぱなしだったのです。
ところが、確か2000年過ぎた頃に、アグレッシブなマイコンが登場してきました。
私の記憶が正しければ、TexasInstrument社が発表したMSP430シリーズが最初だったような気がします。
https://www.ti.com/ja-jp/microcontrollers-mcus-processors/microcontrollers/msp430-microcontrollers/overview.html
※ここら辺は余り自信がありませんが、そう外れてもないかもですw
なにが違ったのかというと、マイコンの消費電流を更に低減させる、とんでもなくアグレッシブな取組です。
『バーストモード動作(間欠動作)』という(他の言葉があるかもしれませんが)概念でマイコンが動く様になりました。
旧来のマイコンよりもクロック速度を上げ、且つ、周期的に起動とスタンバイを繰り返し、起動時にのみマイコンを動かす。
スタンバイ時にはマイコンの演算部もお休みするというモノです。
短時間の限られた期間内に後続で演算処理をし、その後はSleep状態を繰り返すってモノです。
この発想には衝撃を受けました。
なので、私は今でも『バースト(モード)動作』という言葉を(勝手に言ってるだけかも知れませんが、通じますw)よく語ります。
凄く合理的な発想で、マイコンの消費電流を大幅に低減する素晴らしい構成です。
※メジャーなのは『間欠動作』という表現の様ですね。私はついついバーストモード動作と言ってしましますが、同じ物です。
なぜ、LDOやDCDCの話をしている間にこの話を割り込んだのかというと、電源側だけで設計してはダメな為です。
負荷側の状況や状態も含め(結局はソフトの動作も考慮して)、電源を決めていく必要性があるんです。
弊社ではNordic製nRF5xxシリーズばかりをマイコンとして使って居ます。なので他社のマイコンは不明ではありますが。。。
ほぼ確実に現代の各他社マイコンもこの様なバースト動作(完結動作)に成っている筈です。
バーストモード動作を活用して、消費電流を下げていると言うこと。
そうで無い場合があれば、それに応じた同様の新たな電源の考察が必要です。私は対象外ですけどねw
では、そのバーストモード動作(間欠動作)を前提とした考察を始めます。
まず、スタンバイ状態と動作時の消費電流の違いです。
BluetoothLE機能は使うという前提なので、スタンバイ電流とBluetooth LE+マイコンをActiveにした時の消費電流の比較です。
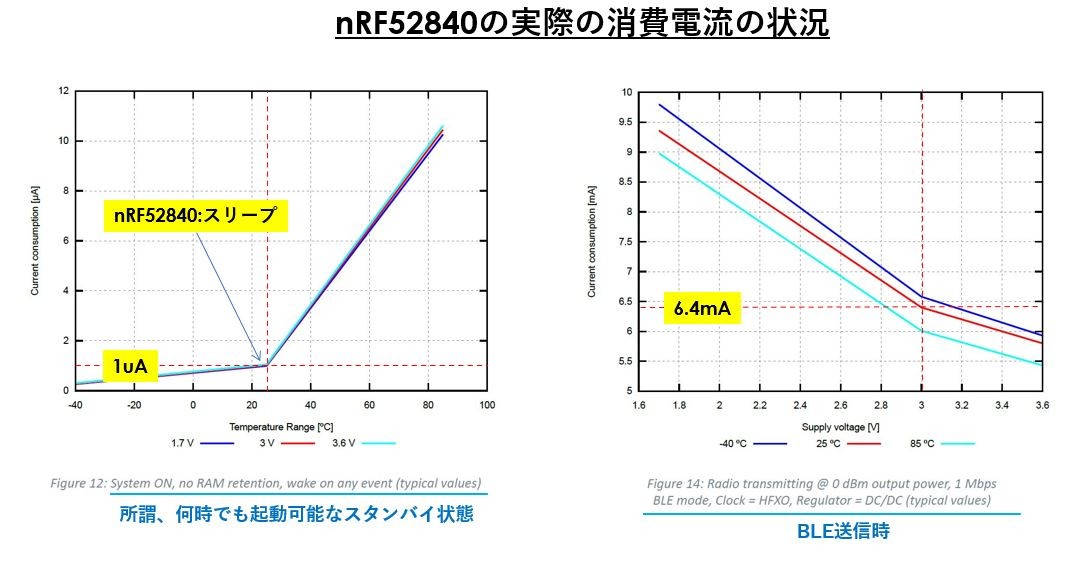
Figuere12:マイコンをスタンバイしている時の消費電流
〔条件〕
➡SystemON:マイコンは何時でも起動できる準備が済んでいる状態⇒所謂、スタンバイ状態。
➡RAM Retentionも起動済み
➡如何なるEvent(割込INT)でも立ち上がれる状態
⇒スタンバイ状態なので当然、Bluetooth部も完全にOFFです。
比較するために25℃条件でみます。
スタンバイ電流:1uAです。
Figure14:マイコンはバリバリ演算しつつ、BluetoothLEで送信している時の最大の消費電流時。
〔条件〕
➡バリバリActive状態
➡TxPower:0dBm
➡送信モード:1Mbpsモード
➡Clock:最高速モード
➡内部安定化電源:DCDCモード⇒ホントはLDOモードと比較したかったのですが、無いのでコレを利用。
アクティブ電流:6.4mA
※LDOモードだともう少し大きくなる筈です。
では、nRF52840はのActive時には、マイコン部もRF部も動きますので、合算した消費電流です。
これらがバーストモード(間欠動作)で動く状況を図に描いてみました。
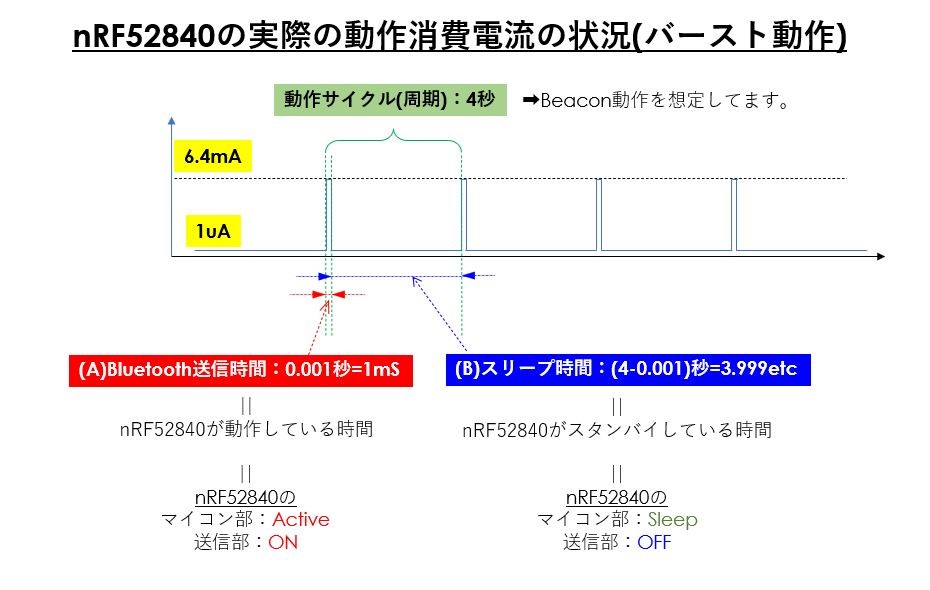
Beaconで良く使われる、4秒毎のBeacon電波(アドバタイズ)送出を想定して4秒周期のバーストモード(間欠動作)を描いてます。
送信時間は概ねだいたい1mS程度ですので、周期4秒中には1mSしか動作して居らず、3.999S間はスタンバイです。
もの凄い効率動作をしていますね。
こう言うのがバーストモード動作(間欠動作)という事なんです。
短い時間で全ての動作を高速で瞬時に完了し、それ以外はスタンバイ状態として、消費電力を大幅に削減するんです。
こんな動作が可能になるとは2000年頃には全く思ってませんでした。素晴らしいです。
このような革新的技術がICに導入されて、BluetoothLEはボタン電池(CR2032)でも1年以上も動ける程の低消費電流を実現しているんです。
LDOと降圧DCDCと昇圧DCDCについて(前編)の解説を思い出して下さい。
もう1度貼っておきます。
嫌な予感がしますね~w
効率のグラフを見れば何か気付かれる筈。
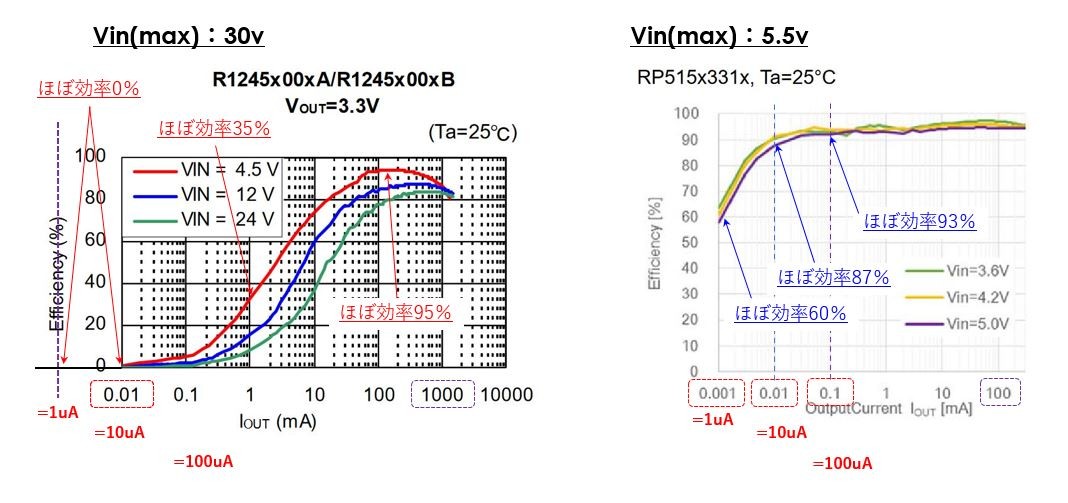
このDCDCの仕様を元に、バーストモード動作をした時にどうなるか、加筆します。
R1245をBluetoothLEの電源に使うと、効率が0%↔10%の所で動きます。
RP525をBluetoothLEの電源に使うと、効率は60%↔95%の所で動きます。
ちょっと、極端に違うタイプのDCDC電源ICを使ってハイライトさせていますが、これとても重要だというのが分かると思います。
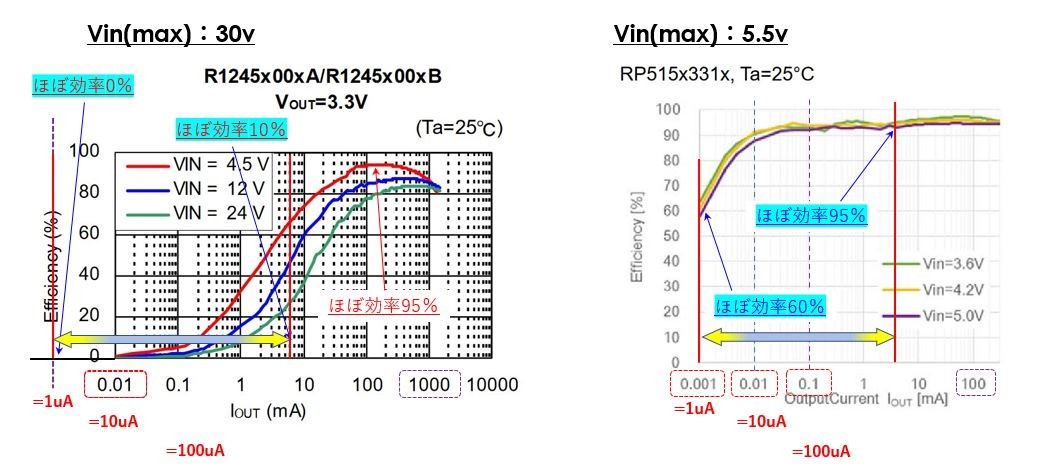
Bluetooth LEチップは、スタンバイ時:1uA/アクティブ時:6.5mAの消費電流です。
※BluetoothLEに限らず、バースト動作(間欠動作)する環境や条件は全てこれに当てはまります。
しかし、R1245を選んだ場合、
特性表から判断すると、1uA時効率:0%/アクティブ時:10%ですので、
〔Vin:4.5v/Vo=3.3v時〕
1uA時(理論値):Io=1.0uA時、Ii(電池出力電流)=1.0×3.3/4.5=0.73uA
➡実力値:0.73÷1%(※0%では計算不能なので)=73uA (実際は0%近いのでもっと流れます)
6.5mAアクティブ時(理論値):Ii(電池出力電流)=6.5x3.3/4.5=4.76mA
➡実力値:4.76÷10%=47.6mA ←本来のIo:6.5mAの7.3倍もの電流を電池から引き込んでいる。
となってしまう計算に成ります。
低消費電力化を実現すべく降圧DCDC電源を採用したつもりの設計が、結果的には消費電流を激増させてしまってます。
実際、実験してみますと、以下の様な異常を観測できます。
使用したDCDC電源ICと電池に触れると、発熱し温かく感じます。当たり前です。DCDC電源ICが発熱しているんです。
➡※CR2032といったリチウムコイン電池を使って居ると、出力可能な電流がせいぜいピークで10mAと言ったところです。
これは、リチウムコイン電池の内部抵抗が高いので、電池の出力電圧が一気に下がってしまいます。
こうなると、降圧DCDCコンバータの動作可能な下限電圧を下まわり、DCDC電源回路自体が停止する事もあります。
所が、RP515xを使えば、
特性表から判断すると、1uA時効率:60%/アクティブ時:95%
〔Vin:3.6v/Vo=3.3v時〕
1uA時:Io=1.0uA時、理論的効率100%だと、Ii(電池出力電流)=1.0×3.3/3.6=0.92uA
➡実力値:0.92÷60%=1.52uA
6.5mAアクティブ時(実力値):Ii(電池出力電流)=6.5x3.3/3.6=5.9mA
〔Vin:5.0v/Vo=3.3v時〕
1uA時:Io=1.0uA時、理論的効率100%だと、Ii(電池出力電流)=1.0×3.3/5.0=0.66uA
➡実力値:0.66÷60%=1.1uA
6.5mAアクティブ時(実力値):Ii(電池出力電流)=6.5x3.3/5.0=4.29mA
こうなると、Vin/Voutの減圧比が大きい程、降圧DCDCとしてRP515xを採用するメリットが出てくることが分かります。
〔注❗〕忘れては成らない事があります。Iq(=Iss)です。
この1uA時にも、電源IC自体の消費電流:Iq(Iss)が加算されます。
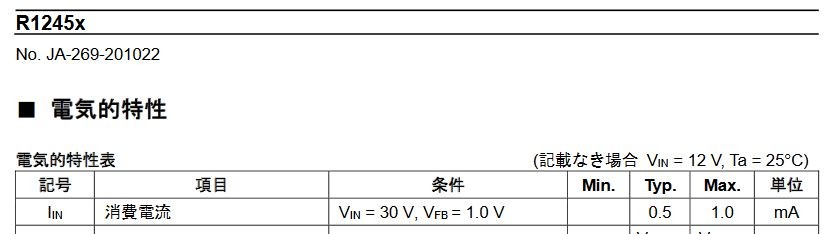
↑R1245x自体の消費電流は、0.5mA(typ)~1mA(max)となってます。500uA~1000uAですw
※R1245の仕様書ではIq(Iss)では無く、Iinと表記されてますね。コレが同じ事だと読み取る能力は必要です。
なので、実際の1uA時(実力値)は
〔Vin:4.5v/Vo=3.3v時〕
1uA時((真の実力):73uA (実際は0%近いのでもっと流れます)+(500uA~1000uA)
設計として、uAのレンジの心配をしてましたが、実の所消費電流が0.5~1.0mAも流れます。
この判断基準で元から全然ダメですねw
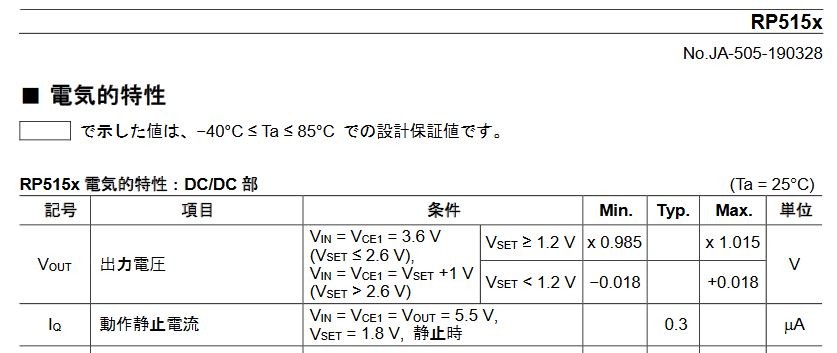
↑RP515xの消費電流Iq=0.3uA(typ)となっており、大変少ないです。真の電流を計算しますと
〔Vin:3.6v/Vo=3.3v時〕
1uA時(真の実力):1.52uA+0.3uA=1.82uA ➡少し増えますね。
6.5mAアクティブ時(真の実力):5.9mA+0.3uA=5.9003mA ➡全く問題無し
〔Vin:5.0v/Vo=3.3v時〕
1uA時(真の実力):1.1uA+0.3uA=1.4uA ➡少し増えますね。
6.5mAアクティブ時(真の実力):4.29mA+0.3uA=4.2903mA ➡全く問題無し
この様な設計的考察は、設計時点から頭の中の引き出しに常時何時でも取り出せる様にしておかねば成りません。
ここではBluetooth LEのSoCを引き出していますが、単純なMCU(マイコン)でも同様です。
マイコンが、バーストモード動作タイプなのかどうか?は必ず気を付けておいて下さい。
ここまではマイコン(やBluetooth LE)を使った場合で、要注意だと説明してますが、実は未だ有ります。
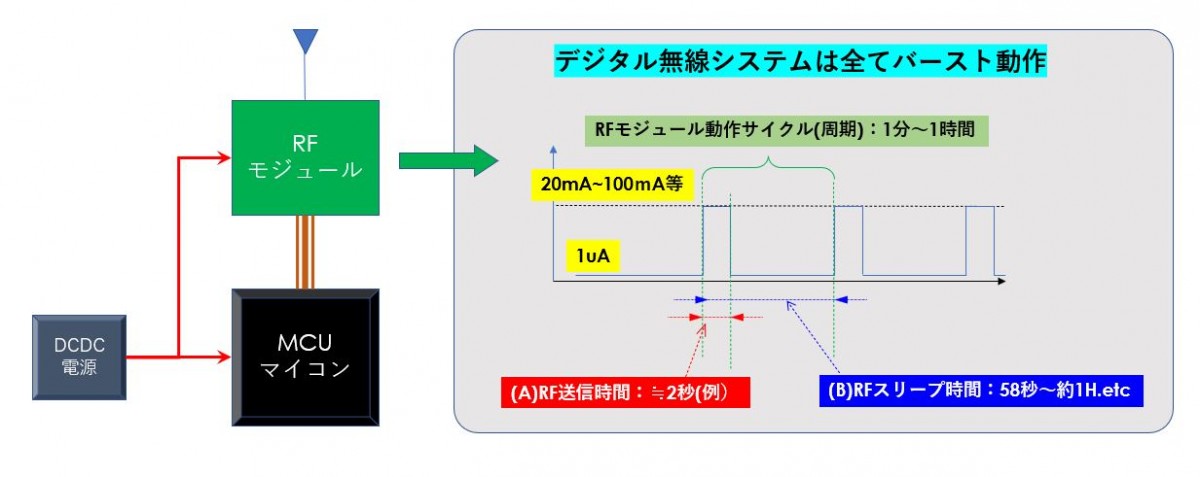
LPWA等を使用する場合にはRFモジュールが使われます。
この時の一つの回路を考察して観ます。以下がその回路図をブロック表示した図面です。
如何でしょうか?こんな感じの回路は何度も拝見したことがあります。
コレまでの知識で、マイコンがバースト動作仕様でなければこの回路は成り立ちそうです。
昨今のRFシステムは900MHz帯以上を使う限り、ほぼ間違い無く『デジタル無線無線システム』に成っています。
すると、必ずRF部が『バーストモード動作』する事になります。
この様にマイコンだけでなく、RFモジュールを動かす際にも、同じ様な効率を検討しておかねば成りません。
DCDC電源ICの出力を下図の様に、マイコンとRFモジュールで共有している場合。
もし、マイコンの動作消費電流が少ない場合は、RFモジュールと合わせても定常消費電流が低くなるような事があり得ます。
この様な場合にも、コレまでの上述の様な注意深い考察が必要になる事を理解して納得していただければと思います。
このような場合どうするのか?
は今後の設計道場でその解を求めていく事になります。
『LDOと降圧DCDCと昇圧DCDCについて』を電源の特徴だけで論じたり、設計してはダメです。
そう言う設計をするかたは多いですが、ちゃんと負荷側(動かす対象側)の動作も、それを動かすソフトも含めて考察しないとダメなのです。
一見複雑に見える様ですが、プロを自任しプロを目指すのであれば、この位の考察や検討や設計はスラスラと出来る様にならないとイケません。
そして、そう言う風な思考は必ず身に付きますので、根性で何度も読み返して納得して頂きたいと思います。
LDOのデメリット:損失 ※特にVdef(=Vin-Vout)×Io:出力電流による損失には要注意
DCDC電源のデメリット:負荷側の動作条件・DCDC電源ICのタイプ・動作消費電流(Iq)にマッチした電源ICを選択する。
という事がポイントなります。
メリットは皆さんご理解してあるはずなので、説明不要でしょうw

電源ICというのはホントに日陰の様な存在ですが、その一方でもの凄い数・種類のものがリリースされています。
実際の所は、この電源ICがなければ回路設計が成り立ちません。
その技術は深く深く・広く広くに渡ります。
設計においては、その設計の目標を達成するために電源ICを選択する事がとても重要なんです。
日本の民生機器の開発においては、私の旧職場でも「安ければ良い❗」という第一目標が強すぎて、最新の電源ICの採用は先ず以て有りませんでした。
『信頼性の(使用)実績』に合わせて『昔から使って居るので一番安い』という思い込みが原因ですかね。
私は電源ICの設計をしているエンジニアとも話しますが、折角素晴らしい電源ICを企画し開発しても価格だけで判断されていることを悔やまれています。
これはホントに残念な現実です。
日本の民生機器開発においては、この最新のICを常に採用し続ける事の重要性を切に唄いたいと思います。
電源ICも、無線ICも然りです。
私自身の回路設計能力とIC開発者の設計能力では雲泥の差があります。
IC開発者の回路設計能力はトンでも無く高いんです。「そのお力をお借りする」のが我々、機器設計技術者だと思うんです。
旧職では、碌すっぽ設計能力の無い技術者が、上から目線でIC設計エンジニアに「あーだ。こーだ」と話している姿を何度も観ました。
もうちょっと素直になれんものかね?と何度も思いました。
「価格が安い・古くからのICしか使いたく無い」な~んて発想こそが、日本の設計エンジニア自身のレベルを下げているように思います。
そして、IC設計エンジニアやメーカーに、よりいっそうの敬意を払うべきなんじゃないかな~と思う私です。
そう言う意味で、最新のICを回路図やレイアウト図も含めてQuadceptでの公開とそれらの解説を順次していく所存です。
次回から、再び、Quadceptプロジェクトファイルの公開が始まります。
PREV
アンテナ理論の公式と知識




